
Project Information
- Title: Snow Pole Detection
- Authors: Maryam Saeidmehr, Vebjørn Haugland
- Institute: Norges teknisk-naturvitenskapelige universitet - NTNU
- Duration: 10 Days
- Used Stack:
- - Python
- - YOLOv9 / YOLO11
- - RF-DETR (Transformer-based Object Detection)
- - Segment Anything Model (SAM) for auto-labeling
- - PyTorch
- - OpenCV + FFmpeg (video frame extraction)
Description
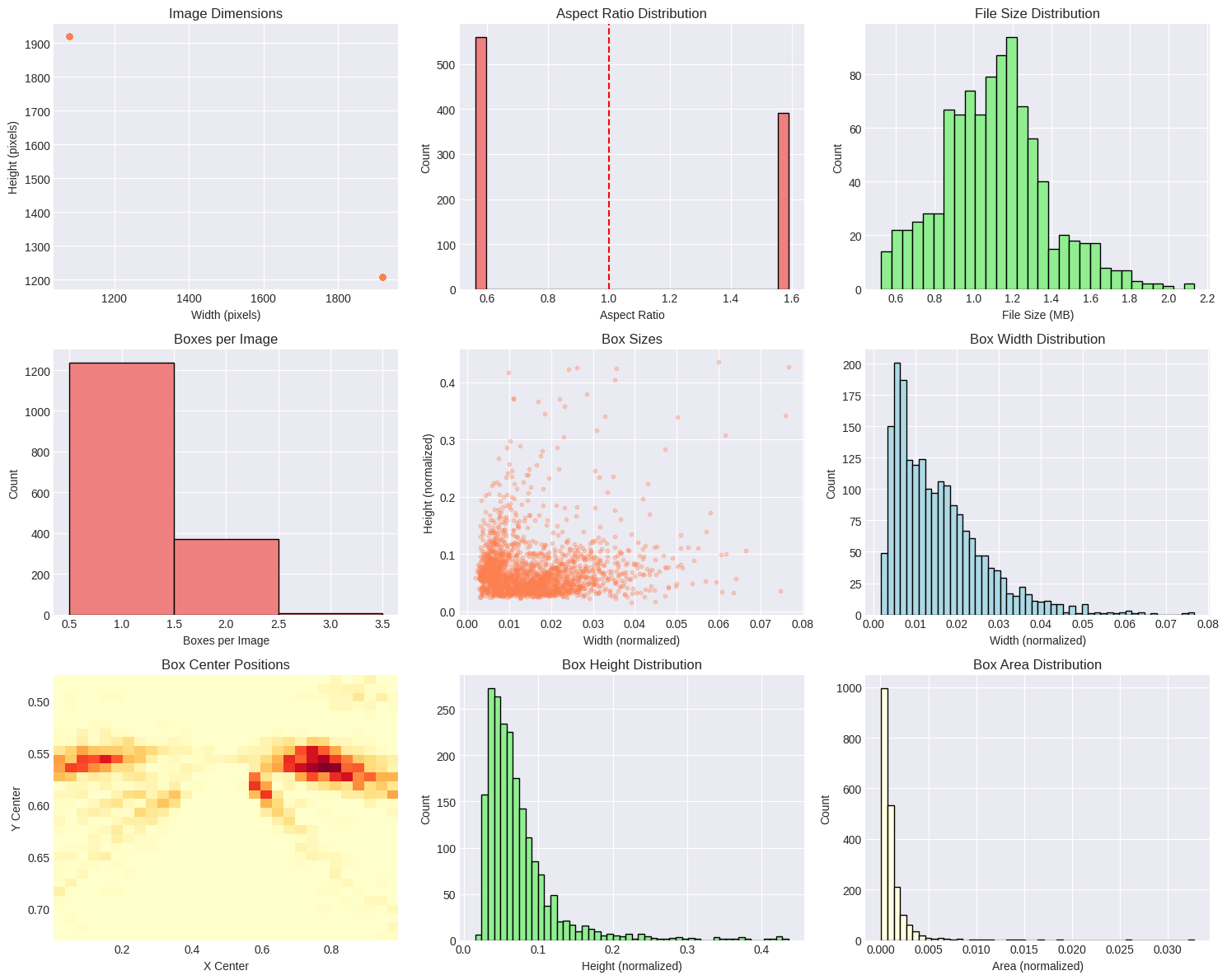
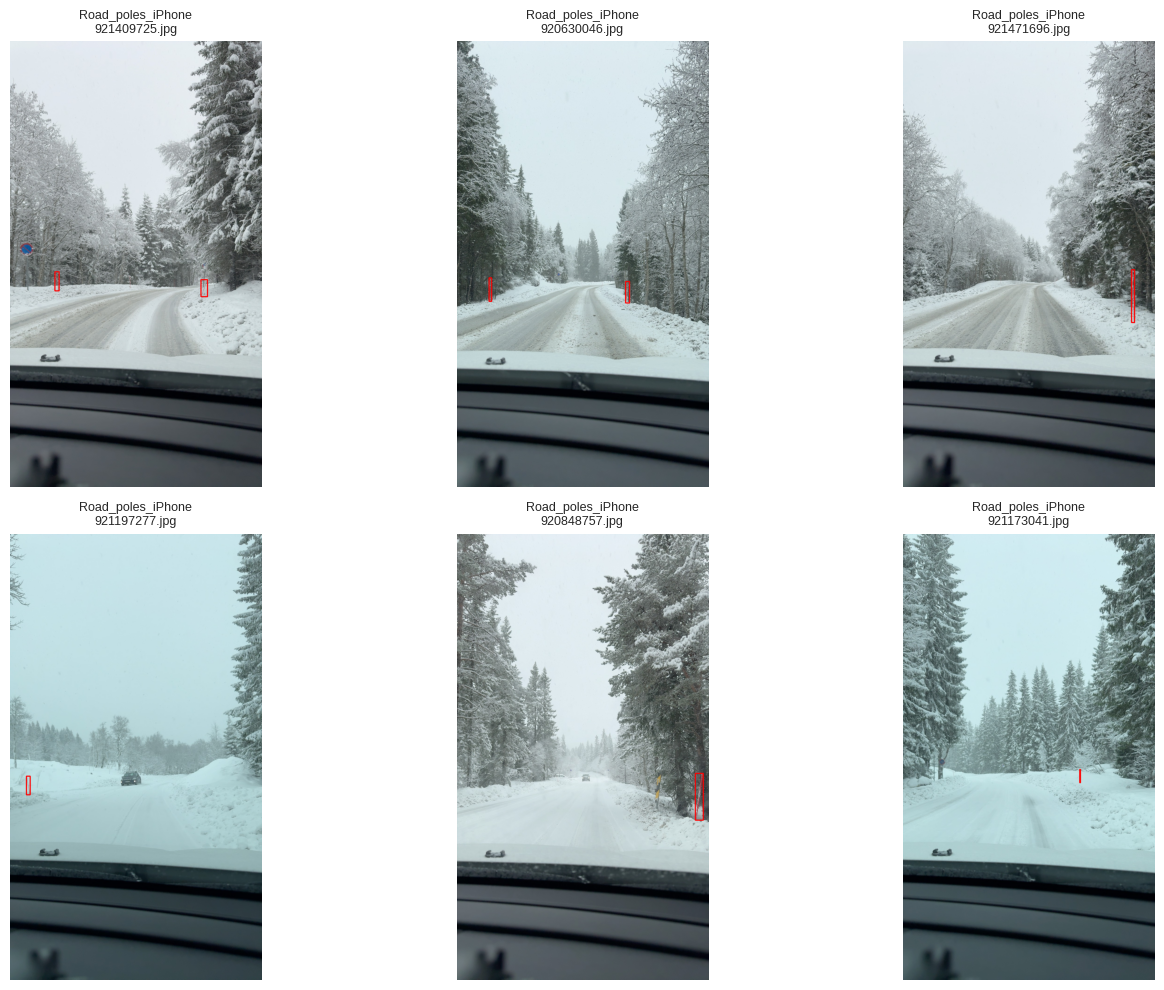
This project develops a computer vision system for detecting snow poles in winter road environments to support autonomous driving. Traditional lane detection fails when roads are covered with snow, so snow poles act as reliable boundary indicators.
The system combines CNN-based detectors (YOLOv9 and YOLO11) with a transformer-based detector (RF-DETR) to improve robustness. A large pseudo-labeled dataset was generated from YouTube winter driving videos using the Segment Anything Model (SAM), expanding the dataset to thousands of training samples.
The final solution applies ensemble techniques such as Test-Time Augmentation (TTA) and Weighted Boxes Fusion (WBF), achieving high detection accuracy while maintaining real-time performance.